[Presentation] Guided Constrained Policy Optimization for Dynamic Quadrupedal Robot Locomotion Oxford Dynamic Robot Systems Group 9:59 4 years ago 685 Далее Скачать
RA-L/ICRA 2020 - Guided Constrained Policy Optimization for Dynamic Quadrupedal Robot Locomotion Oxford Dynamic Robot Systems Group 4:59 4 years ago 1 391 Далее Скачать
Dynamic Locomotion through Online Nonlinear Motion Optimization for Quadrupedal Robots ICRA 2018 2:33 6 years ago 531 Далее Скачать
Dynamic Locomotion through Online Nonlinear Motion Optimization for Quadrupedal Robots Robotic Systems Lab: Legged Robotics at ETH Zürich 2:39 7 years ago 2 545 Далее Скачать
First Steps: Latent Space Control with Semantic Constraints for Quadruped Locomotion ORI - Oxford Robotics Institute 4:38 4 years ago 686 Далее Скачать
Jan Carius - Optimization and Learning Algorithms for Dynamic Locomotion of Walking Robots Robotic Systems Lab: Legged Robotics at ETH Zürich 31:10 3 years ago 2 821 Далее Скачать
Constrained Policy Optimization via Bayesian World Models Aalto Robot Learning Lab 1:00:48 2 years ago 386 Далее Скачать
Not Only Rewards But Also Constraints: Applications on Legged Robot Locomotion RaiLab Kaist 5:19 1 year ago 9 294 Далее Скачать
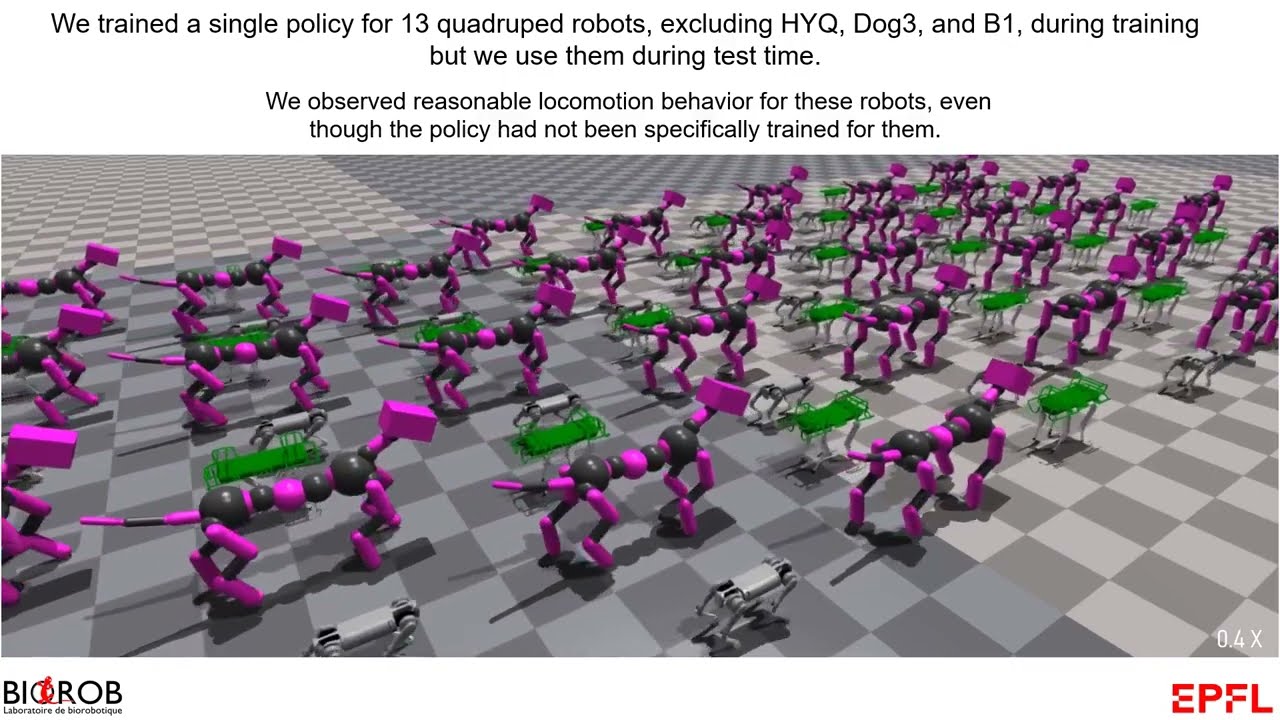
ManyQuadrupeds: Learning a Single Locomotion Policy for Diverse Quadruped Robots BIOROB 1:51 8 months ago 722 Далее Скачать
Constrained robotic optimization and control Robot Locomotion Group 0:54 9 years ago 2 868 Далее Скачать
Real-Time Trajectory Adaptation for Quadrupedal Locomotion using Deep Reinforcement Learning Oxford Dynamic Robot Systems Group 3:00 3 years ago 856 Далее Скачать
Reward-Adaptive Reinforcement Learning: Dynamic Policy Gradient Optimization for Bipedal Locomotion Changxin Huang 2:54 2 years ago 4 071 Далее Скачать
Quadrupedal Locomotion via Event-Based Predictive Control and QP-Based Virtual Constraints (Full) Kaveh Akbari Hamed 4:37 4 years ago 451 Далее Скачать
Locomotion Policy Guided Traversability Learning [IROS 2022] Robotic Systems Lab: Legged Robotics at ETH Zürich 3:00 2 years ago 9 368 Далее Скачать
Dynamic Locomotion and Whole-Body Control for Quadrupedal Robots Robotic Systems Lab: Legged Robotics at ETH Zürich 2:15 7 years ago 2 790 Далее Скачать
[Presentation] Receding-Horizon Perceptive Trajectory Optimization with Learned Initialization Oxford Dynamic Robot Systems Group 10:33 3 years ago 579 Далее Скачать
Learning and Deploying Robust Locomotion Policies with Minimal Dynamics Randomization Oxford Dynamic Robot Systems Group 3:01 2 years ago 468 Далее Скачать
[ICRA 2021 - Presentation] Online Trajectory Optimization for Aerial Motions of a Quadruped Robot Matthew Chignoli 12:22 3 years ago 1 781 Далее Скачать
Just Round: Quantized Observation Spaces Enable Memory Efficient Learning of Dynamic Locomotion A2R-Lab 5:03 1 year ago 35 Далее Скачать
RLSS 2023 - Safe Reinforcement Learning - Felix Berkenkamp Universitat Pompeu Fabra - Barcelona 1:31:01 1 year ago 364 Далее Скачать